Unlock your team’s potential with professional tools to create and deploy pick and place applications.
Get in touch with our team to learn more about how MoveIt Pro can meet your specific pick and place robotics development needs.
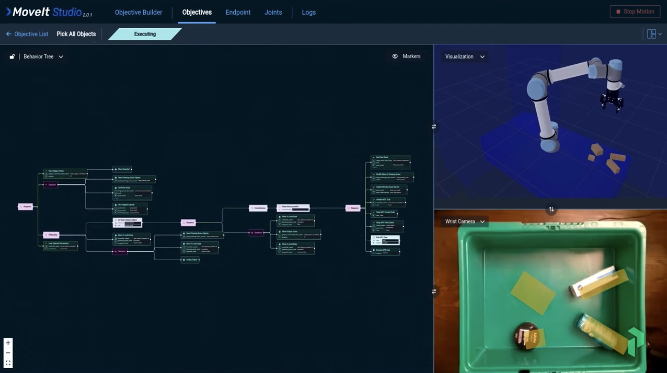
From bin picking to berry harvesting, leverage MoveIt Pro’s flexible pick & place capabilities to accelerate your robotics development and reduce costs.

With its user-friendly interface and a wide range of robotics building blocks, MoveIt Pro empowers robotics engineers to unlock the full potential of their robot arms.
The MoveIt Pro Developer Platform provides most of the building blocks you need while enabling you to develop custom C++ and Python extensions. Built on the modern ROS standard and leveraging Behavior Trees, there is no limit to what you can build on MoveIt Pro.



MoveIt Pro enables your pick and place application to:

Build your own robot or buy one off the shelf, our software is reconfigurable for 5+ DOF arms, various depth sensors, and both vacuum or 2 finger end effectors. Support for linear rails is also available.
MoveIt Pro comes with easy to modify templates for any industry or pick type:

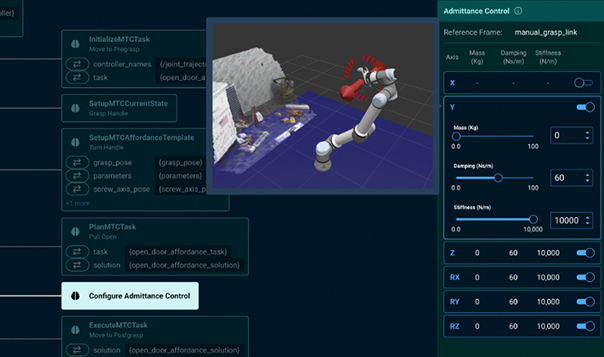
MoveIt Pro’s industry leading motion control capabilities are designed to reduce cycle time, improve manipulation reliability, and automatically generate optimal trajectories.
While rapidly prototyping and tuning your solution with MoveIt Pro, enjoy faster development cycles using:
Get in touch with our team to learn more about how MoveIt Pro can meet your specific pick and place robotics development needs.

